Education
Politecnico di Milano
Doctoral Degree | 2023 - so far

Gwangju Institute of Science and Technology
Master Degree | 2020 - 2022
Thesis Title: Autonomous Landing of a quadrotor on a moving target using integrated sensor
.svg.png)
Isfahan University of Technology
Bachelor's Degree | 2015 - 2020
Publications
Projects
Teleoperation Interface based on visual odometry
This letter presents a novel visuo-haptic interface for Mobile Collaborative Robots, integrating detachable mechanisms and Visual-Inertial Odometry for adaptable control modes, offering comparable performance to commercial MoCap systems in a cost-effective, versatile design.

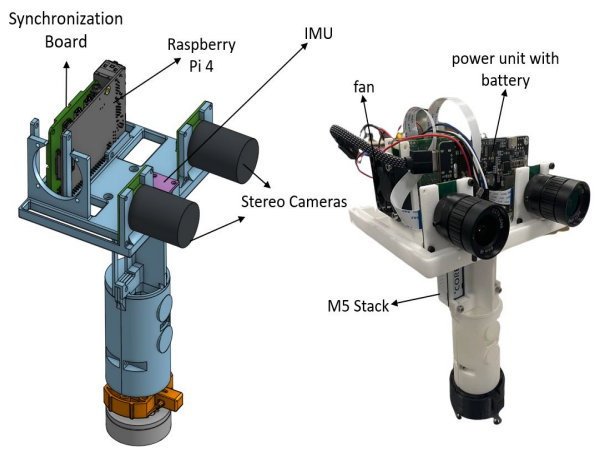
LiDAR, Camera and IMU fusion for Autonomous landing on moving target
Employing a one-dimensional LiDAR and camera fusion, we achieve precise target localization, utilizing drone altitude, camera view, and IMU data for accurate 3D positioning.

Speed Estimation using dash Camera
This project leverages comma.ai's dataset and OpenCV's optical flow alongside a CNN trained in TensorFlow, achieving a validation MSE of approximately 7.56 for speed estimation from dashcam footage.
Fuzzy-PID auto Tuner (Simulation)
I developed an m-file for system behavior interpretation, including peak detection and settling time determination, followed by fuzzy controller design for PID tuning, showcased in an accompanying video.
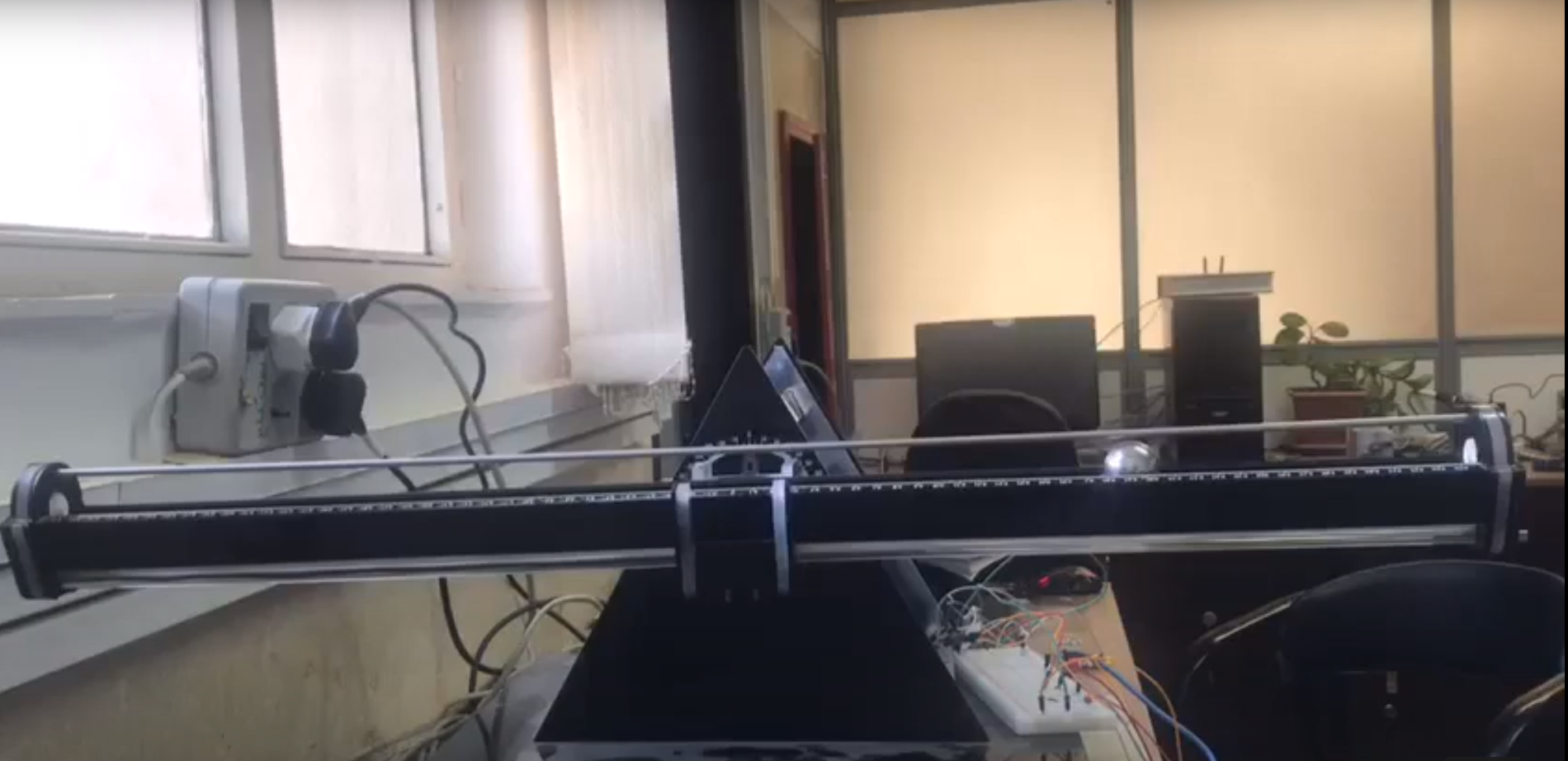
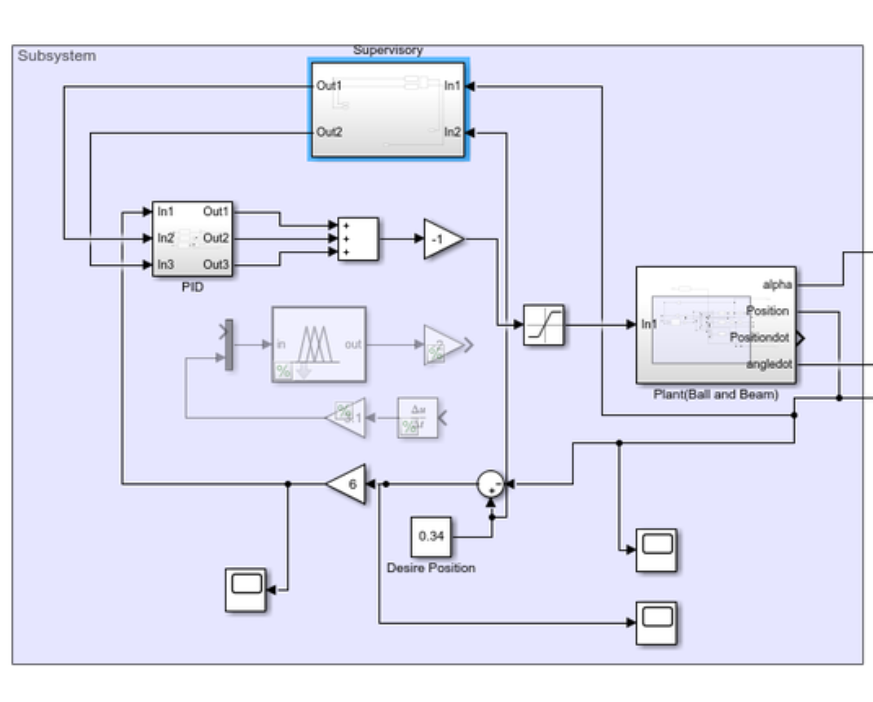
Ball and Beam Control
Engineered a system for precise ball positioning on a beam, leveraging servo motor, potentiometer feedback, and Arduino-based PID control. Employed Matlab-Simulink for real-time programming and fuzzy control, optimizing performance.